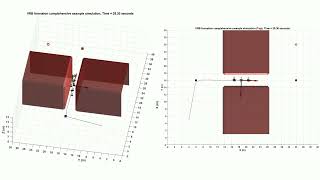
Media Summary: This is a slight modification to the assignment and Formation Control with Position Exchange in Webots [2] Experimental results of student work proposed for Rector's award at University of Zagreb in academic year 2018./2019. Authors: ...
Interactive Formation Control In Complex - Detailed Analysis & Overview
This is a slight modification to the assignment and Formation Control with Position Exchange in Webots [2] Experimental results of student work proposed for Rector's award at University of Zagreb in academic year 2018./2019. Authors: ... A team of researchers at Carnegie Mellon demonstrate how drones can fly together without pre-programming and how to help ... This video shows that a group of iRobot Creates maintaining a Simulate large factories with smarter mobile robot navigation, reliable physics, and real




![Formation Control with Position Exchange in Webots [2]](https://i.ytimg.com/vi/ttwXIA0oZWY/mqdefault.jpg)