Media Summary: Car is controlled by a neural network that is trained to imitate an optimal nonlinear Presented paper can be downloaded here: ... [CMU - F1Tenth] Model Predictive Contouring Control for F1Tenth Racing
Model Predictive Control On F1tenth - Detailed Analysis & Overview
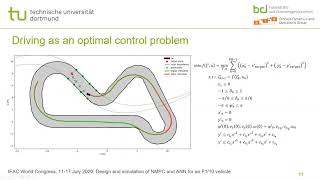
Car is controlled by a neural network that is trained to imitate an optimal nonlinear Presented paper can be downloaded here: ... [CMU - F1Tenth] Model Predictive Contouring Control for F1Tenth Racing Τhis version: - Track-centric ILC approach - Dynamic Curvature Calculation for velocity profile generation - Strict Discrete ... Originally presented at IFAC WC 2020, A. Tatulea-Codrean, T. Mariani, S. Engell. Abstract: This paper addresses the challenges ...









![[CMU - F1Tenth] Model Predictive Contouring Control for F1Tenth Racing](https://i.ytimg.com/vi/_X9e2xBAM0o/mqdefault.jpg)