Media Summary: SHP: Smooth Hypocycloidal Paths with Collision-free and Decoupled Multi-Robot Lifelong Path Planning with Kinematic Constraints for Multi-Agent Pickup and Delivery (5) A tricky one to do a video about this, but here is an tutorial implementation of the A*
5 Path Planning With Different - Detailed Analysis & Overview
SHP: Smooth Hypocycloidal Paths with Collision-free and Decoupled Multi-Robot Lifelong Path Planning with Kinematic Constraints for Multi-Agent Pickup and Delivery (5) A tricky one to do a video about this, but here is an tutorial implementation of the A* Sebastian Castro discusses technical concepts, practical tips, and software examples for motion Forward and inverse kinematic analyses were performed on a This video was uploaded from an Android phone.
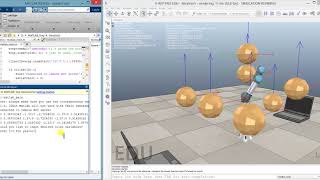
In this ROS tutorial, you'll learn how does Obstacle Avoidance work, what is the Local Planner, the Local Costmap, Student: Tejas Hemant Thosani (thosani2) In this simulation, the UR3 robot arm implements