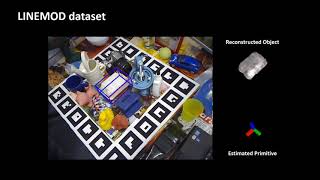
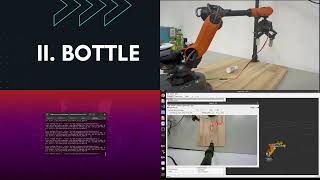
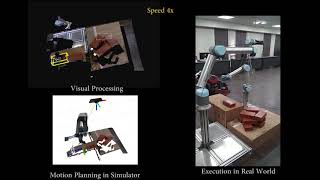
Media Summary: Authors: Kentaro Wada, Edgar Sucar, Stephen James, Daniel Lenton, Andrew J. Davison Description: MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and Robust 手臂:WLkata Mirobot 相機:Intel RealSense Depth Camera D455 測試物品:box、bottle、sphere 目標: 利用演算法估測出適當的夾取 ...
6d Pose Estimation For Robot - Detailed Analysis & Overview
Authors: Kentaro Wada, Edgar Sucar, Stephen James, Daniel Lenton, Andrew J. Davison Description: MyungHwan Jeon and Ayoung Kim, PrimA6D: Rotational Primitive Reconstruction for Enhanced and Robust 手臂:WLkata Mirobot 相機:Intel RealSense Depth Camera D455 測試物品:box、bottle、sphere 目標: 利用演算法估測出適當的夾取 ... 6D Pose Estimation for Robotic Pick and Place Reference: Tremblay, Jonathan, et al. "Deep object 6D Object Pose Estimation from Approximate3 3D Models for Orbital Robotics
Authors: Kiru Park, Timothy Patten, and Markus Vincze Title: Neural Object Learning for Project Webpage: MoreFusion: Multi-object Reasoning for In the video, the AICA System is running on a Siemens BX-59A controller equipped with an NVIDIA A4000 GPU. It seamlessly ... This video introduces GraspGen, a lightweight and real-time





![[HSR-ROBOT] Neural Object Learning for 6D Pose Estimation Using a Few Cluttered Images](https://i.ytimg.com/vi/fQJPS01cmac/mqdefault.jpg)




