Media Summary: 21-ICRA Experiments: Data-Driven Adaptive Task Allocation for Robot Teams In this simulation, Kilobots choose the nearest Behrens J., Stepanova K., Babuska R.: Simultaneous
Adaptive Task Allocation Execution - Detailed Analysis & Overview
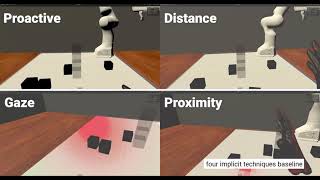
21-ICRA Experiments: Data-Driven Adaptive Task Allocation for Robot Teams In this simulation, Kilobots choose the nearest Behrens J., Stepanova K., Babuska R.: Simultaneous Short paper entitled, "Performance Evaluation of Some In ad-hoc human-robot collaboration (HRC), humans and robots Integrated multi-robot (MR) task and motion planning approach that perform
In this video, we provide an example to show how human behavior change can modify the optimal team plan for multi-robot