Media Summary: Need to get to your goal quickly? Ensure you See the other videos in this series: This video ... Reaching Through Latent Space: From Joint Statistics to
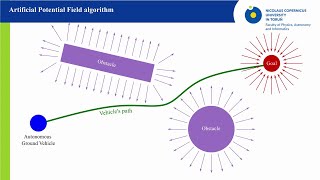
Apf Algorithm Reactive Path Planning - Detailed Analysis & Overview
Need to get to your goal quickly? Ensure you See the other videos in this series: This video ... Reaching Through Latent Space: From Joint Statistics to solving the robot navigation problem by suggested a new Embedded System Class Project. Implement A* The RRT* can be found in the following paper: [1] Karaman, S., & Frazzoli, E. (2010). Incremental sampling-based
This is a complimentary video to the paper: Yakovlev K., Andreychuk A. Towards Time-Optimal Any-Angle robotics It takes a significant amount of time and energy to create these free video ... robotics It takes a significant amount of time and ...








![[2021] Towards Time-Optimal Any-angle Path Planning With Dynamic Obstacles :: Demo](https://i.ytimg.com/vi/k245e3CMUO4/mqdefault.jpg)


