Media Summary: Good charistics for guiding that search okay and that's the stuff of COMPSCI 188, LEC 001 - Fall 2018 COMPSCI 188, LEC 001 - Pieter Abbeel, Daniel Klein Copyright UC Regents; ... Step right up, look alive, and verify your configuration files, because the corporate algorithmic circus just had its entire asset ledger ...
Autorob Lecture 15 Sampling Based - Detailed Analysis & Overview
Good charistics for guiding that search okay and that's the stuff of COMPSCI 188, LEC 001 - Fall 2018 COMPSCI 188, LEC 001 - Pieter Abbeel, Daniel Klein Copyright UC Regents; ... Step right up, look alive, and verify your configuration files, because the corporate algorithmic circus just had its entire asset ledger ... These are the videos for the course "Radar Systems Engineering" by Dr. Robert M. O'Donnell - During this paratactical the following topics: 1. What are Time Related Claims? as the most Controversial Claims 2. Partnering ... MIT 14.310x Data Analysis for Social Scientists, Spring 2023 Instructor: Esther Duflo View the complete course: ...
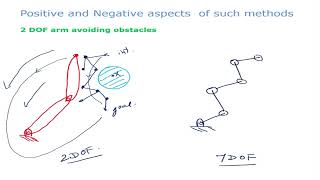
So, in such cases what we do is we use the next method which we will be looking at today that is called






![Sampling-based Optimal Planning [Reading Group : 10.10.21]](https://i.ytimg.com/vi/yZchtTg4nvs/mqdefault.jpg)