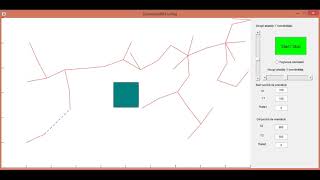
Media Summary: The description of the algorithm can be found in section 5 of chapter 10 in the Modern Robotics book by Frank Chongwoo Park ... Turtlebot2 is configured to move from one path to another using Industrial robots are designed to perform specific tasks and appropriate algorithms for perception, planning, and control.
Bidirectional Rrt - Detailed Analysis & Overview
The description of the algorithm can be found in section 5 of chapter 10 in the Modern Robotics book by Frank Chongwoo Park ... Turtlebot2 is configured to move from one path to another using Industrial robots are designed to perform specific tasks and appropriate algorithms for perception, planning, and control.