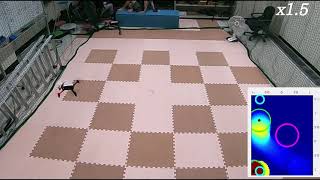
Media Summary: Solving a start-to-goal query without differential constraints ... The latest video is available at the following link: A supplementary video of our ... This video shows the in-lab experimentation of the Enhanced Potential Field (EPF) for
Collision Free Persistent Coverage With - Detailed Analysis & Overview
Solving a start-to-goal query without differential constraints ... The latest video is available at the following link: A supplementary video of our ... This video shows the in-lab experimentation of the Enhanced Potential Field (EPF) for We show the performance of a path planning algorithm for a team of robots executing a Persistent Coverage Control with 3 drones Drone team keep moving by combination of No Hole Visual
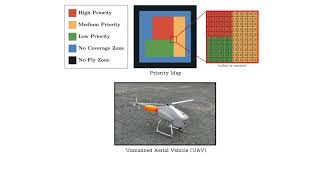
Persistent coverage control with performance guarantee, etc...