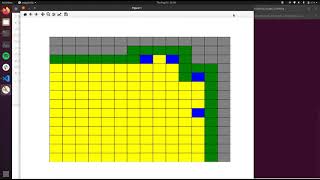
Media Summary: area coverage algorithm with no reward function Video from the published paper "Optimizing and Predicting Swarming Collective Motion Performance for Speaker: Maria Luiza Costa Vianna (École Polytechnique, Laboratoire d'Informatique (LIX), Palaiseau, and ENSTA Bretagne ...
Complete Area Coverage Algorithm - Detailed Analysis & Overview
area coverage algorithm with no reward function Video from the published paper "Optimizing and Predicting Swarming Collective Motion Performance for Speaker: Maria Luiza Costa Vianna (École Polytechnique, Laboratoire d'Informatique (LIX), Palaiseau, and ENSTA Bretagne ... This is a project in the "Robotic Systems" course in the department of Electrical Engineering and Computer Science at the ... This video is about using biased min-consensus to solve a Complete Coverage of an a priori Unknown Environment using a Single Autonomous System Scenario 2
This video shows the preliminar running of Complete Coverage of an a priori Unknown Environment using a Single Autonomous System Scenario 1