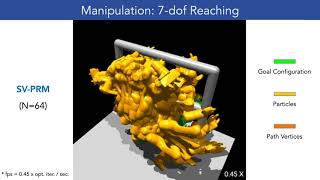
Media Summary: MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ... Soundtrack: "Blue Train" by Coltrain (1958) Title: Stein Variational I quickly show off my solution and understanding of
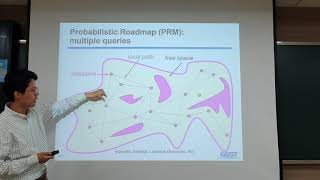
Cs686 7 Probabilistic Roadmaps - Detailed Analysis & Overview
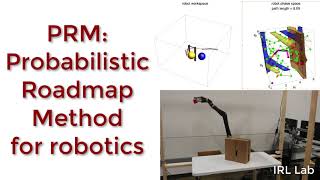
MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ... Soundtrack: "Blue Train" by Coltrain (1958) Title: Stein Variational I quickly show off my solution and understanding of We use a 5 DoF hierarchical abstraction in order to control the swarm, which is easily coupled with a Demonstration of an A* Probabilistic Roadmap for Path Planning PRM is a sampling-based robot motion-planning technique developed in the 1990s that is still in use today. We start with PRM on ...
A conference talk from ICAPS 2009, given by Michael Kneebone. Stepping Over an Obstacle (shown by the red rectangular)