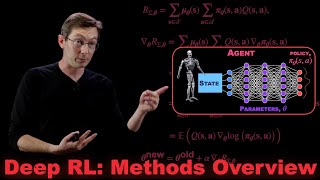
Media Summary: This video gives an overview of methods for A goal-driven autonomous mapping and exploration system that combines reactive and planned This video demonstrates a sample training phase of 4 non-holonomic
Deep Rl Based Robot Navigation - Detailed Analysis & Overview
This video gives an overview of methods for A goal-driven autonomous mapping and exploration system that combines reactive and planned This video demonstrates a sample training phase of 4 non-holonomic A Behavior-Based Mobile Robot Navigation Method with Deep Reinforcement Learning Talk Title: Human-in-the-Loop Machine Learning for