Media Summary: Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... A Behavior-Based Mobile Robot Navigation Method with Deep Reinforcement Learning Mobile Robot Navigation using Deep Q-Network
Deepxplore Mobile Robot Navigation Using - Detailed Analysis & Overview
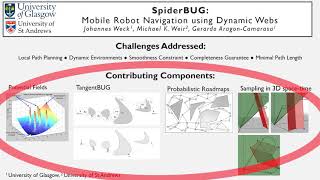
Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... A Behavior-Based Mobile Robot Navigation Method with Deep Reinforcement Learning Mobile Robot Navigation using Deep Q-Network Explore the transformative potential of Deep Reinforcement Learning (DRL) in enhancing autonomous Video Author: Johannes Weck Video Submission for ICRA 2021. Abstract: The problem addressed in this paper is that of an ... ... the University of Rochester My talk is kinodnamic motion planning for
In this video I have shown the working of Autonomous (IROS 2017) arxiv: Deep Reinforcement Learning has been successful in various virtual tasks. John J. Leonard is Samuel C. Collins Professor of Mechanical and Ocean Engineering in the MIT Department of Mechanical ... But it is still rarely used in real world applications especially for continuous control of real