Media Summary: Supplementary video for the IROS 2023 paper " Consider the problem of finding collision-free trajectories for a redundant robot that must perform a geometric This video is a supplement to the paper: M. Toussaint, K. R. Allen, K. A. Smith, and J. B. Tenenbaum:
Differentiable Task Assignment And Motion - Detailed Analysis & Overview
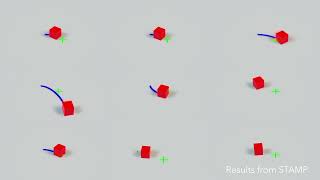
Supplementary video for the IROS 2023 paper " Consider the problem of finding collision-free trajectories for a redundant robot that must perform a geometric This video is a supplement to the paper: M. Toussaint, K. R. Allen, K. A. Smith, and J. B. Tenenbaum: STAMP: Differentiable Task and Motion Planning via Stein Variational Gradient Descent This video shows a demonstration of a general A presentation for our RA-L 2022 paper, "
Project Website: The project report, videos and additional details are listed ... Date: 11/21/2024 Speaker: Kevin Tracy Abstract: Robotic simulation, planning, estimation, and control, have all been built on top ...

![[ICLR2023] DiffMimic: Efficient Motion Mimicking with Differentiable Physics](https://i.ytimg.com/vi/B0unbsvGsLc/mqdefault.jpg)




![[HERB] Table Clearing with Task and Motion Planning](https://i.ytimg.com/vi/RpzjJtzuwj4/mqdefault.jpg)



![[Kevin Tracy Ph.D. Defense] Differentiable Convex Modeling for Robotic Motion Planning and Control](https://i.ytimg.com/vi/L_AlqGmw5H8/mqdefault.jpg)
