Media Summary: Omni-directional robot with a web-cam looking up and a The 1st Israeli Smart Transportation Students Conference (ISTSC-1) was hosted by Bar-Ilan University on December, 3 2020. Video complementing our conference paper in ICRA 2015.
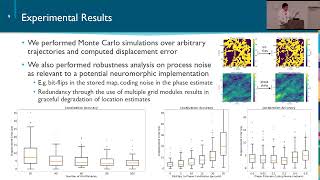
Distributed Localization With Grid Based - Detailed Analysis & Overview
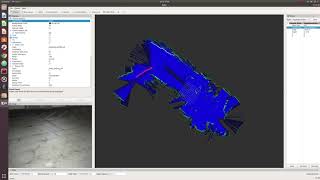
Omni-directional robot with a web-cam looking up and a The 1st Israeli Smart Transportation Students Conference (ISTSC-1) was hosted by Bar-Ilan University on December, 3 2020. Video complementing our conference paper in ICRA 2015. Visualization of the robots belief state regarding its surroundings and current location as predicted by an Occupancy This video shows numerical demonstration of probalistic robotics spring 2012, problemset 5:
Andreas Herz, Ludwig Maximilian University of Munich Representation, ... This video presents a tangible demonstration of the histogram