Media Summary: Autonomy Talks - 27/09/2021 Speaker: Prof. Guillaume Sartoretti, National University of Singapore Title: Recordings of my talk at IFAC World Congress 2020 on Can cars think — together? What if traffic jams could disappear without adding more lanes? A new study explores how
Distributed Mpc For Multi Agent - Detailed Analysis & Overview
Autonomy Talks - 27/09/2021 Speaker: Prof. Guillaume Sartoretti, National University of Singapore Title: Recordings of my talk at IFAC World Congress 2020 on Can cars think — together? What if traffic jams could disappear without adding more lanes? A new study explores how For our next livestream, we're getting hands on to show you how to build This video demonstrates a new algorithm for fast computation of collision-free trajectories for This video shows the simulation results of the paper "
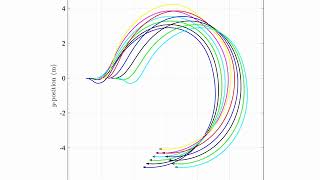
Formation control example (Simulation) CCTA 2020. Authors: Haoze Dong, Meng Guo, Chengyi He and Zhongkui Li Code: This video presents simulation scenarios of the