Media Summary: This is a video supplement to the book "Modern Robotics: Mechanics, For CS498IR: AI for Robotic Manipulation Spring 2021, University of Illinois at Urbana-Champaign Instructor: Kris Hauser ... Experiments with over 1000 trials on an ABB YuMi comparing
Grasp Planning Example - Detailed Analysis & Overview
This is a video supplement to the book "Modern Robotics: Mechanics, For CS498IR: AI for Robotic Manipulation Spring 2021, University of Illinois at Urbana-Champaign Instructor: Kris Hauser ... Experiments with over 1000 trials on an ABB YuMi comparing AI in Robotics Reading group is organized by the Faculty and Students at the Dept. of Computer Science, University of Toronto for ... This video demonstrates our one-shot learning approach for Supplementary video for RAL2019 submission. Overall demonstration video of the
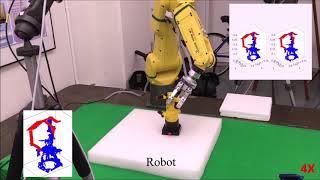
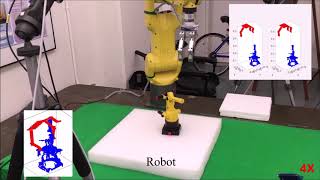
High-speed motions in pick-and-place operations are critical to making robots cost-effective in many automation scenarios, from ... Template-Based Learning of Grasp Selection