Media Summary: PDF: Authors: Hoai My Van, Ozgur Oguz, Zhehua ... In this paper, we present SeGMan, a hybrid motion Marc Toussaint and Jung-Su Ha and Danny Driess Machine Learning & Robotics Lab, University Stuttgart Intelligent Systems Lab ...
Guided Sequential Manipulation Planning Using - Detailed Analysis & Overview
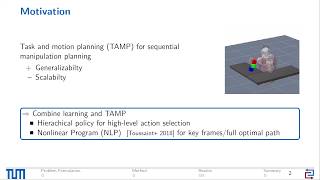
PDF: Authors: Hoai My Van, Ozgur Oguz, Zhehua ... In this paper, we present SeGMan, a hybrid motion Marc Toussaint and Jung-Su Ha and Danny Driess Machine Learning & Robotics Lab, University Stuttgart Intelligent Systems Lab ... Abstract: Enabling robots to perform multi-stage forceful Marc Toussaint and Jung-Su Ha and Danny Driess Machine Learning & Robotics Lab, University Stuttgart Physical Reasoning ... Junchi Liang, Bowen Wen, Kostas E. Bekris and Abdeslam Boularias.
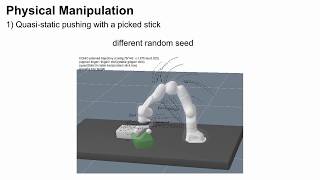
This video summarizes our work on discovering complex contact Abstract: We present a self-supervised representation learning approach for visual reasoning and integrate it into a nonlinear ...










![[CoRL 2020] Self-Supervised Learning of Scene-Graph for Robotic Sequential Manipulation Planning](https://i.ytimg.com/vi/JZ4FepUo6TY/mqdefault.jpg)
