Media Summary: First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... Associate Provost of Research Benedetto Piccoli, of Rutgers University - Camden, presents Lagrangian and Sparse So excited to be back to content creation! Code:
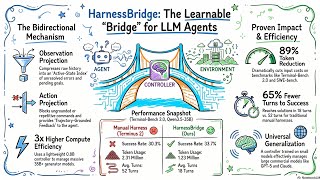
Harnessbridge A Learnable Bidirectional Controller - Detailed Analysis & Overview
First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... Associate Provost of Research Benedetto Piccoli, of Rutgers University - Camden, presents Lagrangian and Sparse So excited to be back to content creation! Code: End-to-End Vision-Based Quadrotor Navigation with Hybrid Attention and Guided Reinforcement Learning Eric and Wendy Schmidt Center Symposium: Biomedical Science and AI April 28 - 29, 2026 Day 1, Feature Aerial manipulation (AM) promises to move Un- manned Aerial Vehicles (UAVs) beyond passive inspection to contact-rich tasks ...
00:00 Overview 03:34 Concat 07:32 Concat Different Dimensions 09:23 Add 11:52 Add Different Dimensions 15:15 U-Net ... All rights w/ authors: Self-Harness: Harnesses That Improve Themselves Hangfan Zhang, Shao Zhang, Kangcong Li, Chen Zhang ... This video by Kathleen Champion describes a new approach for simultaneously discovering models and an effective coordinate ... This lecture provides an overview of how to use machine



![[ICRA2026] Aerial Manipulation with Contact-Aware Onboard Perception and Hybrid Control](https://i.ytimg.com/vi/5gcPD-OCGPg/mqdefault.jpg)