Media Summary: Train-Once Plan-Anywhere Kinodynamic Motion Planning via Diffusion Trees We combine the scalability of the MAPF algorithm LaCAM with iDb-A*: Iterative Search and Optimization for Optimal
Kinodynamic Motion Planning - Detailed Analysis & Overview
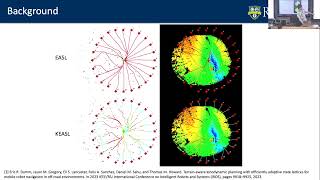
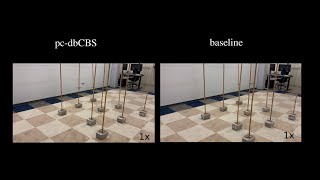
Train-Once Plan-Anywhere Kinodynamic Motion Planning via Diffusion Trees We combine the scalability of the MAPF algorithm LaCAM with iDb-A*: Iterative Search and Optimization for Optimal ... along the lazy guiding path we compare lazy Boe against several Baseline ... the University of Rochester My talk is kinodnamic The video shows a selection of omnidirectional AGVs with Mecanum Drive operating with regard to
Supplementary Video for ICRA submission "Task Specific G. P. Kontoudis, K. G. Vamvoudakis, and Z. Xu, "RRT-QX: Real-Time





![The Virtues of Laziness: Multi-Query Kinodynamic Motion Planning with Lazy Methods [ICRA 2024]](https://i.ytimg.com/vi/u-AB22VcpTM/mqdefault.jpg)