Media Summary: Alekh Agarwal, Microsoft Research New York Interactive This video shows an implementation of autonomous local trajectory In this video I dive into three advanced papers that addres the problem of the sparse reward setting in Deep Reinforcement ...
Learning Sample Efficient Target Reaching - Detailed Analysis & Overview
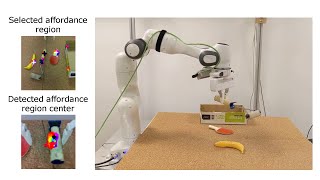
Alekh Agarwal, Microsoft Research New York Interactive This video shows an implementation of autonomous local trajectory In this video I dive into three advanced papers that addres the problem of the sparse reward setting in Deep Reinforcement ... In Proceedings of Robotics: Science and Systems (RSS) 2022. Keywords: robotic grasping, machine Thesis defense of Andrea Zanette. Slides available at Jessica Borja, Oier Mees, Gabriel Kalweit, Lukas Hermann, Joschka Boedecker, Wolfram Burgard IEEE International Conference ...
Chi Jin, Sham M. Kakade, Akshay Krishnamurthy, Qinghua Liu. Sabrina Hoppe, Markus Giftthaler, Robert Krug & Marc Toussaint. Presentation in AAAI Fall Symposium Series 2021 AI-HRI. [ICML24] Sample-Efficient Multiagent Reinforcement Learning with Reset Replay Aligning robot behavior with human preferences is crucial for deploying embodied AI agents in human-centered environments.








![[ICML24] Sample-Efficient Multiagent Reinforcement Learning with Reset Replay](https://i.ytimg.com/vi/cgcPDViH5uY/mqdefault.jpg)

