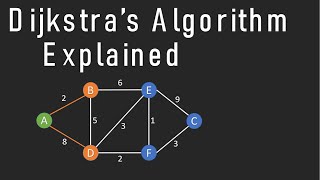
Media Summary: This is a video supplement to the book "Modern Robotics: Mechanics, In this video, I introduce two important concepts in robot A* Algorithm and Potential Field methods, movement cost and heuristic cost, multipoint potential field methods.
Mod06lec31 Path Planning Graph Construction - Detailed Analysis & Overview
This is a video supplement to the book "Modern Robotics: Mechanics, In this video, I introduce two important concepts in robot A* Algorithm and Potential Field methods, movement cost and heuristic cost, multipoint potential field methods. MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ... See the other videos in this series: This video ... My contribution to May the 4th: help R2-D2 find a
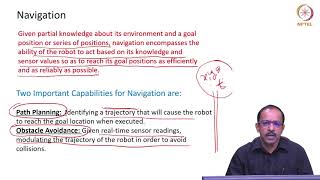
Welcome to 'Introduction to Robotics' course ! Time to plan a route! This video explores fundamental Mobile Robot Navigation, autonomous navigation,