Media Summary: Lecture 1.2. Wherein we introduce and explore the operation of the The shown robot (SparkFun Redbot) is shown to avoid obstacles and reach the goal using the different This demo is from homework from EE596 Robot
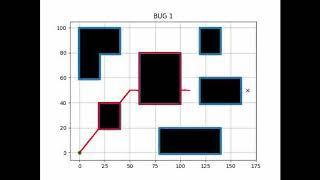
Motion Planning Algorithm Bug 0 - Detailed Analysis & Overview
Lecture 1.2. Wherein we introduce and explore the operation of the The shown robot (SparkFun Redbot) is shown to avoid obstacles and reach the goal using the different This demo is from homework from EE596 Robot