Media Summary: This video introduces CDMPs, a novel method to include operational constraints while learning motor skills using DMPs. Abstract: ... Instead of sending a trajectory to the robot as is common in ros2_control, individual In this video, we demonstrate how hierarchy can be employed to build
Motion Primitives - Detailed Analysis & Overview
This video introduces CDMPs, a novel method to include operational constraints while learning motor skills using DMPs. Abstract: ... Instead of sending a trajectory to the robot as is common in ros2_control, individual In this video, we demonstrate how hierarchy can be employed to build In this video, we demonstrate a novel modular framework for safe and robust Traditional robot learning in imitation and reinforcement learning (IL/RL) often predicts per-step actions or short action segments, ... Motion primitives planning demonstration video
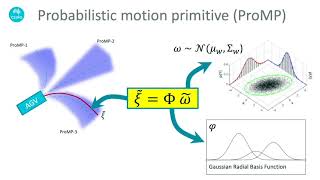
This work presents a novel path planning strategy for fast and agile exploration using aerial robots. Tailored to the combined need ... Paper: Tobias Low, Tirthankar Bandyopadhyay, Jason Williams, Paulo V K Borges, "PROMPT: Probabilistic



![[memmows] Motion primitives. Part 1](https://i.ytimg.com/vi/hfnQtOTrtdQ/mqdefault.jpg)