Media Summary: The video accompanies our ICRA 2019 paper. Distributed Target Estimation and Ergodic Control for Sven Koenig Professor, Computer Science Department, University of Southern California (USC) Abstract Teams of
Multi Robot Informative Path Planning - Detailed Analysis & Overview
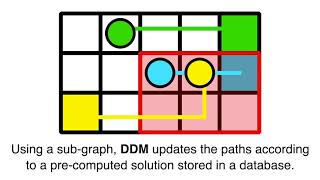
The video accompanies our ICRA 2019 paper. Distributed Target Estimation and Ergodic Control for Sven Koenig Professor, Computer Science Department, University of Southern California (USC) Abstract Teams of We propose a novel centralized and decoupled algorithm, DDM, for solving In this demo, goals for vehicles are randomly created. Our optimal
![Multi-Robot Planning [Lecture, Marija Popović]](https://i.ytimg.com/vi/Wcvw8qyUan8/mqdefault.jpg)

![[2019 July] Multi-agent Path Planning](https://i.ytimg.com/vi/Fer_irn4BG0/mqdefault.jpg)