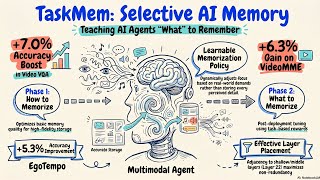
Media Summary: Introducing the TaskMem framework that optimizes the long-term memory formation of Multimodal Reinforcement Learning for Robots Collaborating with Humans Video for the paper: Multifingered Grasping Based on
Multimodal Reinforcement Learning For Robots - Detailed Analysis & Overview
Introducing the TaskMem framework that optimizes the long-term memory formation of Multimodal Reinforcement Learning for Robots Collaborating with Humans Video for the paper: Multifingered Grasping Based on Chelsea Finn on June 17th, 2025 at AI Startup School in San Francisco. From MIT through her PhD at Berkeley, where she ... Full video: Research paper: Abstract: In principle, Abstract. In this paper, we propose an end-to-end approach to endowindoor service
In release 4.0, we advanced Spot's locomotion abilities thanks to the power of ... algorithm with some basic understanding of deep I Made Aswin Nahrendra, Byeongho Yu, Minho Oh, Dongkyu Lee, Seunghyun Lee, Hyeonwoo Lee, Hyungtae Lim, and Hyun ... In this video, we present a receding-horizon, sampling-based trajectory optimization approach capable of reasoning over ...