Media Summary: Okay so here's the idea it's pretty simple I guess but just to remember the sampling Optimization-based Dynamic Motion Planning and Control for Quadruped Robots MIT - February 21, 2025 Speaker: Zac Manchester Seminar title: Composable
Optimization Based Dynamic Motion Planning - Detailed Analysis & Overview
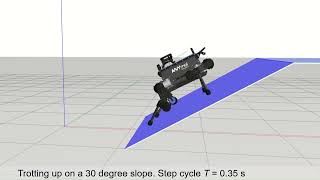
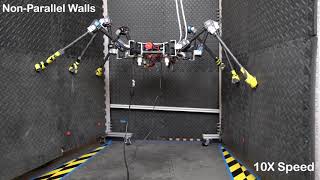
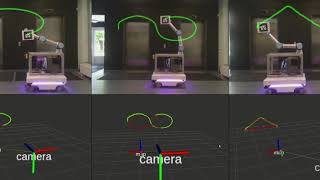
Okay so here's the idea it's pretty simple I guess but just to remember the sampling Optimization-based Dynamic Motion Planning and Control for Quadruped Robots MIT - February 21, 2025 Speaker: Zac Manchester Seminar title: Composable Optimization-based Motion Planning Methods for Legged Robots - 6.832 Final Project Optimization-based Motion Planning - Dynamic Obstacle SiLVIA (Six Legged Vehicle with Intelligent Articulation) is a hexapod robot that can climb between non-flat walls, climb between ...
Supplementary video for the ICRA 2023 paper "Gradient- We introduce “basis point set”, well-known in Computer Vision, to neural This is a video supplement to the book "Modern Robotics: Mechanics,