Media Summary: Need to get to your goal quickly? Ensure you plan the right Supplementary video of our work: RangedIK: An [IROS2020] Optimization-based Path Planning for Person Following using Following Field
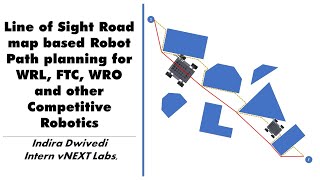
Optimization Based Robot Path Planning - Detailed Analysis & Overview
Need to get to your goal quickly? Ensure you plan the right Supplementary video of our work: RangedIK: An [IROS2020] Optimization-based Path Planning for Person Following using Following Field In this video, Our summer Intern, Indira Dwivedi presents the idea of simple line of sight Optimization-based Motion Planning Methods for Legged Robots - 6.832 Final Project See the other videos in this series: This video ...
Paper, video, open-source code, slides and more: Intro: 00:29 - Why Legged




![[IROS2020] Optimization-based Path Planning for Person Following using Following Field](https://i.ytimg.com/vi/5nAmaqDqgYk/mqdefault.jpg)