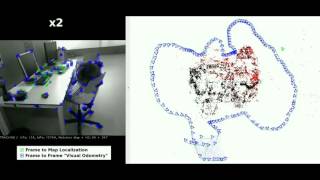
Media Summary: Example of mapping a room and saving the map. After capturing, the frames were processed with a machine learned model to ... The map was created using RGBD (+depth), yet relocalization works reasonably well with only RGB. See the map created in the ... Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ...
Orb Slam2 Monocular Point Cloud - Detailed Analysis & Overview
Example of mapping a room and saving the map. After capturing, the frames were processed with a machine learned model to ... The map was created using RGBD (+depth), yet relocalization works reasonably well with only RGB. See the map created in the ... Code & Info: Authors: Raúl Mur-Artal, J. M . M. Montiel and Juan D. Tardós University of ... Using- Ubuntu 18.04.4 ROS Melodic camera:- web cam of laptop (with no ... Video showing robot recording its own trajectory during a simple forward and back movement.