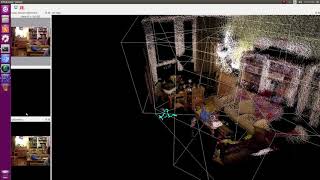
Media Summary: Pointcloud generation with RTAB map and ROS RTAB-Map point cloud using ROI ratios option Parameters: Voxel grid leaf size 0.05 m Max z: 15 m.
Pointcloud Generation With Rtab Map - Detailed Analysis & Overview
Pointcloud generation with RTAB map and ROS RTAB-Map point cloud using ROI ratios option Parameters: Voxel grid leaf size 0.05 m Max z: 15 m. Using TX1 Kinect and ROS roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" Parameters: Voxel grid leaf size 0.05 m Max z: 4 m. Point Cloud Generation using RTABMAP & ZED Stereo Camera
this video shown the result about my localization result in Watch the Hiwonder MentorPi M1 Raspberry Pi 5 robot car demonstrate