Media Summary: Accepted to IEEE International Conference on Robotics and Automation (ICRA) arXiv: Sarah Dean UC Berkeley February 21, 2020 Machine LLM-as-an-Investigator, an advanced AI methodology designed to improve technical problem diagnosis by prioritising ...
Primer Perception Aware Robust Learning - Detailed Analysis & Overview
Accepted to IEEE International Conference on Robotics and Automation (ICRA) arXiv: Sarah Dean UC Berkeley February 21, 2020 Machine LLM-as-an-Investigator, an advanced AI methodology designed to improve technical problem diagnosis by prioritising ... (This video is narrated). To reach a given destination safely and accurately, a micro aerial vehicle needs to be able to avoid ... CogSci 2020 presentation of Show or tell? Demonstration is more We study dynamic pricing over a finite number of periods in the presence of demand-model ambiguity. Departing from the typical ...
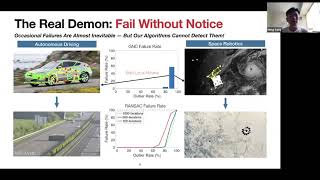
Abstract: Autonomous robots operating in unstructured real-world environments must The Foundations of Knowledge - Lesson 3 of 6 Course playlist: ... Welcome to the eighth lecture of the Engineering Resilient Cognitive Systems course! In this session, we turn our attention to one ...