Media Summary: ICRA 2018 Spotlight Video Interactive Session Wed AM Pod U.4 Authors: Schlegel, Dominik; Colosi, Mirco; Grisetti, Giorgio Title: ... This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ... The video shows the creation and on the fly improvement of a map using our new
Proslam Graph Slam From A - Detailed Analysis & Overview
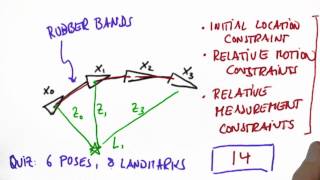
ICRA 2018 Spotlight Video Interactive Session Wed AM Pod U.4 Authors: Schlegel, Dominik; Colosi, Mirco; Grisetti, Giorgio Title: ... This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ... The video shows the creation and on the fly improvement of a map using our new This video provides some intuition around Pose This is a short video lecture by Wolfram, Giorgio, and Cyrill explaining The pose graph SLAM method - The front end
ICRA 2018 Spotlight Video Interactive Session Wed PM Pod P.8 Authors: Li, Jie; Kaess, Michael; Eustice, Ryan; ... interactive_slam is an open source 3D LIDAR-based mapping framework. In contrast to existing automatic