Media Summary: This video accompanies the paper "Strategizing at This is the virtual presentation we gave for our ICRA paper in the summer 2020. A ballbot is a dynamically moving robot, ... This Project is the tenth task of the Udacity Self-Driving Car Nanodegree program. The main goal of the project is to implement ...
Pythonrobotics Model Predictive Speed And - Detailed Analysis & Overview
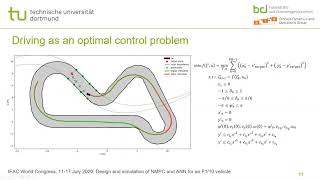
This video accompanies the paper "Strategizing at This is the virtual presentation we gave for our ICRA paper in the summer 2020. A ballbot is a dynamically moving robot, ... This Project is the tenth task of the Udacity Self-Driving Car Nanodegree program. The main goal of the project is to implement ... This video is part of the RoboJackets Software Training Program for Fall 2021. Originally presented at IFAC WC 2020, A. Tatulea-Codrean, T. Mariani, S. Engell. Abstract: This paper addresses the challenges ... Video presentation to go with our research paper "Context aware robotic arm using fast embedded
Learn how to develop an adaptive cruise control system with An up view of the simulation of an Eco Adaptive Cruise Control with optimal lane changing in a two lane traffic.
![[PythonRobotics] Model predictive speed and steering control](https://i.ytimg.com/vi/j7SlLLaPbok/mqdefault.jpg)

![Path-Following Model Predictive Control of Ballbots [ICRA 2020 Presentation]](https://i.ytimg.com/vi/V7YI1V6mRTY/mqdefault.jpg)
![[PythonRobotics] Path tracking simulation with pure pursuit steering control and PID speed control.](https://i.ytimg.com/vi/iFzmAfcQ6oM/mqdefault.jpg)