Media Summary: A brief presentation of the Predictive Artificial robotics It takes a significant amount of time and energy to create these free video ... lidar We created a Python, Gazebo, and ROS2 Jazzy Jalisco implementation and simulation ...
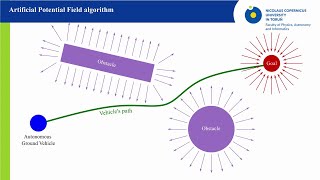
Pythonrobotics Potential Field Algorithm - Detailed Analysis & Overview
A brief presentation of the Predictive Artificial robotics It takes a significant amount of time and energy to create these free video ... lidar We created a Python, Gazebo, and ROS2 Jazzy Jalisco implementation and simulation ... Lecture 22, part 3 of 3 1. Path planning with a 2-link robot 2. This video shows the integration of an Adaptive Artificial Obstacle avoidance in leader-follower formation using artificial potential field algorithm
APSC103 Final Presentation - Simulated demonstration of
![[PythonRobotics] Potential Field algorithm.](https://i.ytimg.com/vi/9UkU8wtC_qE/mqdefault.jpg)