Media Summary: This work presents the development of an intelligent nonlinear sliding mode control strategy to control the motion of a UDE-based Trajectory Tracking Control for a Quadrotor Slung-Load System: constant wind disturbance Robust Trajectory Tracking by a Quadcopter: A Game Against Nature
Quadrotor Uav Robust Trajectory Tracking - Detailed Analysis & Overview
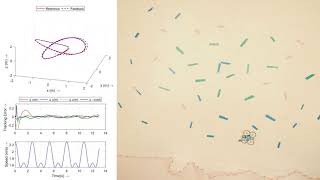
This work presents the development of an intelligent nonlinear sliding mode control strategy to control the motion of a UDE-based Trajectory Tracking Control for a Quadrotor Slung-Load System: constant wind disturbance Robust Trajectory Tracking by a Quadcopter: A Game Against Nature The main contribution of this work is the In this work, we describe the hardware and software of a Stabilize quadrotor drone flight with deep reinforcement learning controller (trajectory tracking 8)
For more details see Manjunath, Abhishek, et al. "Application of virtual target based guidance laws to path The payload is initially staying at a stationary point, then starts The ability to transport payloads transform Unmanned Aerial Vehicles (