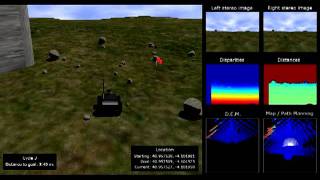
Media Summary: This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ... Autonomous machines are forecasted to dramatically increase the efficiency of warehouses, factories, and other industrial ... This video shows an autonomous mission of the ANYmal
Robot Automatic Navigation Simulation Path - Detailed Analysis & Overview
This video explains the basics of SLAM (Simultaneous Localization and Mapping), how a LIDAR sensor works, frontier exploration ... Autonomous machines are forecasted to dramatically increase the efficiency of warehouses, factories, and other industrial ... This video shows an autonomous mission of the ANYmal Given: - Indoor map of the environment - Two mobile