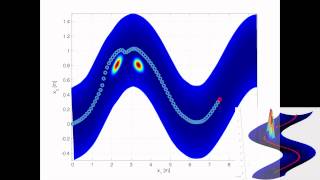
Media Summary: In this research, we propose a user-guided motion planning algorithm in combination with reinforcement ROBOTIS HUMANOID AI Sapiens. Open-Source Humanoid Platform for Physical AI powered by DYNAMIXEL-Q. This In this guest lecture for the ETH Zurich course "
Robot Learning By Demonstration - Detailed Analysis & Overview
In this research, we propose a user-guided motion planning algorithm in combination with reinforcement ROBOTIS HUMANOID AI Sapiens. Open-Source Humanoid Platform for Physical AI powered by DYNAMIXEL-Q. This In this guest lecture for the ETH Zurich course " Click Here to Subscribe: Click here to watch more For more information about Stanford's graduate programs, visit: April 10, 2026 This ...



![Lucas Beyer: Vision in the Age of LLMs [ETHZ Robot Learning 2026]](https://i.ytimg.com/vi/0XB7fNS_ONg/mqdefault.jpg)