Media Summary: In this video you will learn how to locate a robot in order to reach all of the required positions in a layout using Visual Components. In this video, Michael Bartczak explains how to simulate and code the gripper (end-effector) and pick and place tasks in Learn how to create an XZ lifter mechanism in
Robotstudio Tutorial Reachability - Detailed Analysis & Overview
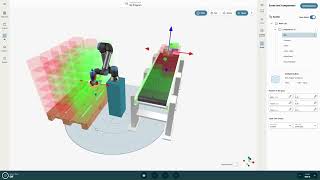
In this video you will learn how to locate a robot in order to reach all of the required positions in a layout using Visual Components. In this video, Michael Bartczak explains how to simulate and code the gripper (end-effector) and pick and place tasks in Learn how to create an XZ lifter mechanism in The video demonstrates a few simple examples in In this 1/2 hour video, Mr. Domer demonstrates to students how to use Work Objects and how they can be beneficial to Robot ... ABB RobotStudio Tutorial - Create a Basic Simulation Station