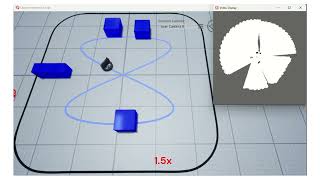
Media Summary: Space robots are considered vital for future in-orbit servicing and active debris removal tasks. The high actuation redundancy of ... Omnidirectional robots can be realized using Mecanum wheels or using a suitable arrangement of conventional steerable wheels. Two experiments are shown here. One where the UAV hovers over the UGV, which would be a point of
Singularity Free Trajectory Tracking For - Detailed Analysis & Overview
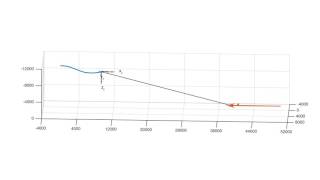
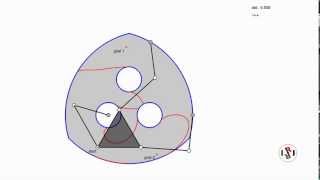
Space robots are considered vital for future in-orbit servicing and active debris removal tasks. The high actuation redundancy of ... Omnidirectional robots can be realized using Mecanum wheels or using a suitable arrangement of conventional steerable wheels. Two experiments are shown here. One where the UAV hovers over the UGV, which would be a point of This is the supplementary video for the paper entitled " Recorded video of the presentation given at the IEEE International Conference in Robotics and Automation (ICRA), 2024, ... The video shows a 3RRR robotic mechanism (actuated joints on the base) performing a
Demo performed for the research article entitled: "A Receding Horizon Iterative learning control (ILC) is a control technique that is best suited for systems that perform repetitive tasks, starting from the ... Trajectory Tracking for Multi-Manipulator Systems in Constrained Environments