Media Summary: See the other videos in this series: This video ... Dynamic Window Path Panning for a Quadrotor UAV This work presents an integrated approach that combines
Uav Path Planning In Dynamic - Detailed Analysis & Overview
See the other videos in this series: This video ... Dynamic Window Path Panning for a Quadrotor UAV This work presents an integrated approach that combines This video demonstrates a simulation of using D* lite for Susanna Sandoyan presents her capstone project titled "Fixed-Wing Heuristic-based Incremental Probabilistic Roadmap for Efficient
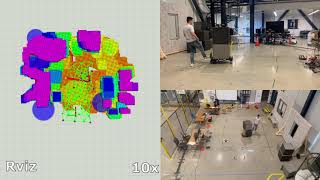
This presentation is Submitted in partial fulfilment of the requirements of the course Final Year Project in Computer Science (SCS ... Animation for 3 strategies of the DUCPP paper. Code available here: Optimal Control for a