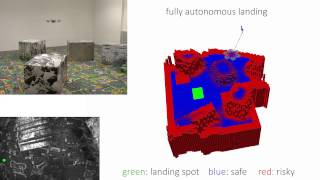
Media Summary: In this paper, we propose a resource-efficient system for real-time 3D terrain reconstruction and landingspot detection for micro ... This video presents the results of the obstacle avoidance experiments described in the paper " The challenges of guiding satellites in deep-space with limited knowledge about the environment and limited processing power.
Vision Based Perception For Autonomous - Detailed Analysis & Overview
In this paper, we propose a resource-efficient system for real-time 3D terrain reconstruction and landingspot detection for micro ... This video presents the results of the obstacle avoidance experiments described in the paper " The challenges of guiding satellites in deep-space with limited knowledge about the environment and limited processing power. I am building a positioning system that uses



![[CVPR-2022] Hang Zhao | Vision-centric 3D Perception for Scalable Autonomous Driving](https://i.ytimg.com/vi/FC3XD0k5f-0/mqdefault.jpg)