Media Summary: Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. * Category: Aerial Systems: ... Psychological & Brain Sciences at Dartmouth presents: Randolph Blake, Vanderbilt Koehler Lecturer "Probing Visual Code: Paper: Abstract: This paper presents PANTHER, ...
A Perception Aware Flatness Based - Detailed Analysis & Overview
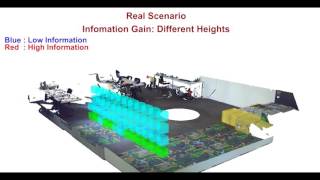
Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. * Category: Aerial Systems: ... Psychological & Brain Sciences at Dartmouth presents: Randolph Blake, Vanderbilt Koehler Lecturer "Probing Visual Code: Paper: Abstract: This paper presents PANTHER, ... The maintenance of visual features within the sensor field-of-view (FOV) during aggressive maneuvers poses a significant ... In this paper, we give a double twist to the problem of planning under uncertainty. State-of-the-art planners seek to minimize the ... Considering visual localization accuracy at the planning time gives preference to robot motion that can be better localized and ...
Visit to get a 30-day free trial + 20% off your annual subscription Comparison of PD formation contorl and the This video presents the experimental validation for the theoretical work demonstrated in the paper :"A