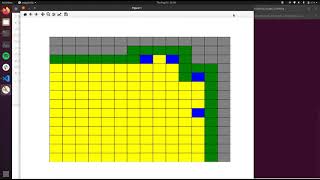
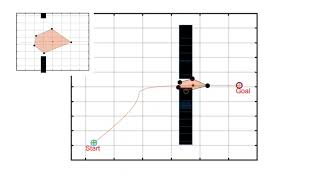
Media Summary: See the other videos in this series: This video ... This environment is supposed to allow path planning and following the human around. After this if the user starts the operation of ... MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ...
Darp Algorithm Divide Areas Algorithm - Detailed Analysis & Overview
See the other videos in this series: This video ... This environment is supposed to allow path planning and following the human around. After this if the user starts the operation of ... MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ... A Quasi-centralized Collision-free Path Planning Approach for Multi-Robot Systems ( Dynamic ...