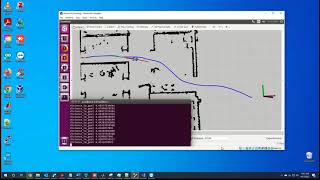
Media Summary: Note: Lessons in the ROS 101 course are not edited in order for you to see the hiccups along the way and how to troubleshoot ... With the results of onboard classification the surveyor is responsible for the actual mission planning like ECE 595 - Intro to CAVs - ROS Path Planning
Ece 761 07 Path Planning - Detailed Analysis & Overview
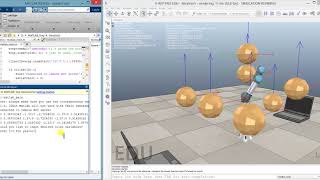
Note: Lessons in the ROS 101 course are not edited in order for you to see the hiccups along the way and how to troubleshoot ... With the results of onboard classification the surveyor is responsible for the actual mission planning like ECE 595 - Intro to CAVs - ROS Path Planning Student: Tejas Hemant Thosani (thosani2) In this simulation, the UR3 robot arm implements So as previously mentioned we will look into three different classes of approaches to the problem of Using the ROS move_base package ( which includes a global planner and local planner, we use ...
MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ...




![[ACC 2020] Metaheuristic Path Planning for Autonomous Surface Vehicles](https://i.ytimg.com/vi/y94cxkz6EZs/mqdefault.jpg)