Media Summary: Paper, video, open-source code, slides and more: Intro: 00:29 - Why Legged Robots? 01:15 - Context of ... Paper, entire open-source code to generate these motions (TOWR, IFOPT) and visualize (XPP), slides and more: ... ICRA 2018 Spotlight Video Interactive Session Tue PM Pod H.2 Authors: Winkler, Alexander W.; Bellicoso, C. Dario; Hutter, Marco ...
Gait And Trajectory Optimization Through - Detailed Analysis & Overview
Paper, video, open-source code, slides and more: Intro: 00:29 - Why Legged Robots? 01:15 - Context of ... Paper, entire open-source code to generate these motions (TOWR, IFOPT) and visualize (XPP), slides and more: ... ICRA 2018 Spotlight Video Interactive Session Tue PM Pod H.2 Authors: Winkler, Alexander W.; Bellicoso, C. Dario; Hutter, Marco ... Quadruped Robot Gait and Trajectory Optimization Implemented the direct collocation method of Turns out I accidentally reverse engineered their landing controller. (but sort of not really, see article) Original twitter post: ...
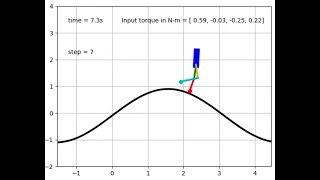
Recovery from arbitrary initial condition in 3 steps using Hybrid SpaceWorks® QuickShot™ is fully featured software suite that is intuitive, fast, and at the cutting edge of stochastic