Media Summary: S. Thoduka, N. Hochgeschwender, J.Gall, P.G. Plöger, "A Multimodal Handover Failure Detection Dataset and Baselines", ... Title: Asynchronous Task Plan Refinement for This workshop brings together researchers from robotics, computer vision, and AI to discuss new
Icra2024 A Method For Multi - Detailed Analysis & Overview
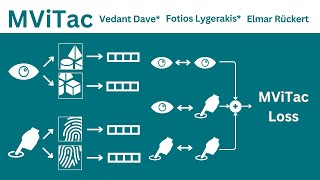
S. Thoduka, N. Hochgeschwender, J.Gall, P.G. Plöger, "A Multimodal Handover Failure Detection Dataset and Baselines", ... Title: Asynchronous Task Plan Refinement for This workshop brings together researchers from robotics, computer vision, and AI to discuss new MViTac: Self-Supervised Visual-Tactile Representation Learning via Multimodal Contrastive Training Deep learning, as a prominent research area, has witnessed remarkable research growth, resulting in diverse architectures and ... Paper title: Co-designing Manipulation Systems Using Task-Relevant Constraints URL: ...
2024 IEEE International Conference on Robotics and Automation (ICRA) (accepted) Composable Interaction Primitives: A Structured Policy Class for Efficiently Learning Sustained-Contact Manipulation Skills. An open research question in robotics is how to combine the benefits of model-free reinforcement learning (RL) - known for its ...
![The Virtues of Laziness: Multi-Query Kinodynamic Motion Planning with Lazy Methods [ICRA 2024]](https://i.ytimg.com/vi/u-AB22VcpTM/mqdefault.jpg)