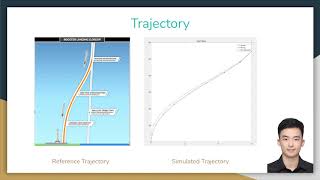
Media Summary: Telluride Neuromorphic Workshop tutorial For Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing RViz visualisation of the an optimisation-based
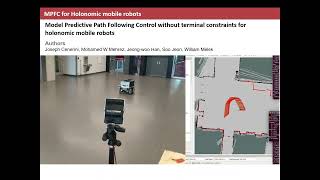
Model Predictive Path Following For - Detailed Analysis & Overview
Telluride Neuromorphic Workshop tutorial For Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing RViz visualisation of the an optimisation-based Check out our recently published paper in Control Engineering Practice Title: This is just a simulation of mobile robot with 4 mecanum wheels. General setup: a KUKA Light-weight Robot IV is controlled by an external PC via Ethernet. The constrained
This video is part of an ICRA 2016 submission. The Georgia Tech AutoRally platform drives fully autonomously using only ... Nonlinear model-predictive path/tube-following control on ABB IRB120 [ICRA2024] This paper presents a novel Stochastic Optimal Control (SOC) method based on