Media Summary: ... utilizing a stochastic optimal control technique called Robust This video is part of an ICRA 2016 submission. The Georgia Tech AutoRally platform drives fully autonomously using only ... In this tutorial I explalin basics of two
Model Predictive Path Following Visualisation - Detailed Analysis & Overview
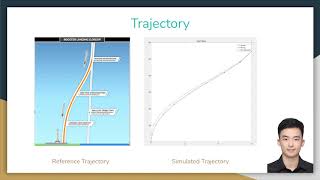
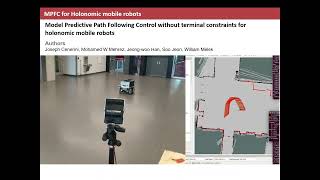
... utilizing a stochastic optimal control technique called Robust This video is part of an ICRA 2016 submission. The Georgia Tech AutoRally platform drives fully autonomously using only ... In this tutorial I explalin basics of two Telluride Neuromorphic Workshop tutorial For Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing This is just a simulation of mobile robot with 4 mecanum wheels.
Check out our recently published paper in Control Engineering Practice Title: Nonlinear model-predictive path/tube-following control on ABB IRB120