Media Summary: This video introduces the popular sampling-based Demonstração do funcionamento do algoritmo Video of the presentation at IROS 2022 of the paper "T-
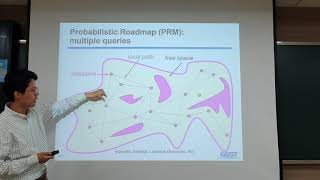
Probabilistic Roadmap Prm Implementation - Detailed Analysis & Overview
This video introduces the popular sampling-based Demonstração do funcionamento do algoritmo Video of the presentation at IROS 2022 of the paper "T- Stepping Over an Obstacle (shown by the red rectangular) This is the extra credit vedio for ECE 470 course, this vedio is edited and recorded by Yuqing Zhang. The topic is the Probabilistic Roadmap Method (PRM) Implementation to Avoid Obstacle
Stepping On the Object (shown by the red rectangular) A course project in UM ROB550. A downward-looking camera detects objects on the table (assuming static environment), and the ...

![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)