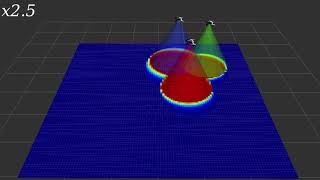
Media Summary: Note that the animation view in this video is rotated 180 degrees from the figure shown in the paper to match the camera ... Persistent Coverage Control by Drone Team (with Energy Management) Persistent Coverage Control with 3 drones
Dissimilarity Based Persistent Coverage Control - Detailed Analysis & Overview
Note that the animation view in this video is rotated 180 degrees from the figure shown in the paper to match the camera ... Persistent Coverage Control by Drone Team (with Energy Management) Persistent Coverage Control with 3 drones Drone team keep moving by combination of No Hole Visual Federico Pratissoli - UNIMORE, University of Modena and Reggio Emilia Talk Topic: Distributed ... C. Sagüés and A. Martinoli, "Optimal Path Planning and
Collision and obstacle avoidance, and persistification are achieved by CBF while reference: T. Shimizu, S. Yamashita, T. Hatanaka, K. Uto, M. Mammarella, and F. Dabbene, Angle-aware